CHINA PRESENTA SU PRIMER ROBOT MINERO ESPACIAL
Investigadores de la Universidad de Minería y Tecnología de China han desarrollado el primer robot minero espacial de fabricación nacional, un avance que posiciona al país asiático en la vanguardia de la exploración y explotación de recursos extraterrestres. Este innovador dispositivo, inspirado en la locomoción de insectos y aves, está diseñado para operar en entornos de microgravedad como la Luna y asteroides cercanos a la Tierra.
Por Amaranta Marquez
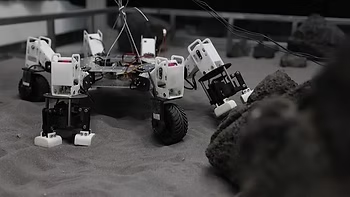
Investigadores de la Universidad de Minería y Tecnología de China desarrollan el primer robot minero espacial de China.
Investigadores de la Universidad de Minería y Tecnología de China liderados por el profesor Liu Xinhua han desarrollado el primer robot minero espacial de China, el cual cuenta con una estructura de seis patas: tres equipadas con ruedas y tres con garras. Esta configuración le permite desplazarse eficientemente por terrenos variados; las ruedas facilitan el movimiento en superficies lisas, mientras que las garras proporcionan estabilidad en áreas rocosas o de suelo suelto.
Las ruedas están fabricadas con una aleación de memoria de titanio a base de níquel, lo que les permite recuperar su forma original tras deformaciones causadas por fuerzas externas. Este material también ofrece resistencia a las extremas fluctuaciones de temperatura y a la radiación espacial.
La estructura de garra-espina del robot mejora su capacidad de sujeción y agarre en condiciones de microgravedad, inspirada en la dinámica trepadora de los pájaros carpinteros y en técnicas de origami. Esta característica es crucial para operaciones de perforación y recolección de muestras en cuerpos celestes con baja gravedad, donde la estabilidad es un desafío significativo.
Liu explicó que el diseño de sus garras, de tipo matriz, mejora la adhesión y la capacidad de anclaje en microgravedad, lo que permite al robot estabilizarse para la toma de muestras y adaptar su movimiento al terreno.
Aplicaciones en Misiones Espaciales
Este desarrollo tecnológico tiene implicaciones directas en futuras misiones espaciales de China. El robot podría desempeñar un papel fundamental en la exploración de la Luna y de asteroides, especialmente en misiones como Chang’e-7, programada para 2026, que buscará depósitos de hielo de agua en el polo sur lunar, y Chang’e-8, prevista para 2028, que experimentará con la utilización de recursos in situ y establecerá las bases para una posible exploración tripulada antes de 2030.
Además, Pekín tiene planes de iniciar la construcción de una estación de investigación lunar internacional entre 2028 y 2035, lo que subraya la importancia de contar con tecnologías avanzadas como este robot para la explotación eficiente y segura de recursos extraterrestres.
Infraestructura de Pruebas y Validación
Para garantizar el rendimiento del robot en condiciones espaciales, el equipo de investigación ha construido una instalación de pruebas que simula el suelo arenoso de asteroides cercanos a la Tierra. Además, han implementado un sistema de suspensión para replicar las condiciones de microgravedad, permitiendo evaluar y optimizar las capacidades del robot antes de su despliegue en misiones reales. El equipo ya ha solicitado una patente para el prototipo, lo que refleja la originalidad y potencial de esta tecnología.
Contexto Global y Competencia
La minería espacial ha capturado la atención de diversas naciones y empresas privadas en los últimos años. En 2020, la empresa china Origin Space anunció el lanzamiento de su primer “robot de minería espacial”, denominado NEO-1, destinado a probar tecnologías relacionadas con la captura y manipulación de pequeños cuerpos celestes. Aunque NEO-1 no estaba diseñado para realizar minería real, su misión era verificar y demostrar múltiples funciones, como la maniobra orbital y la captura simulada de cuerpos celestes pequeños.
Este contexto resalta la creciente competencia y colaboración en el ámbito de la minería espacial, donde China busca consolidarse como líder mediante desarrollos tecnológicos propios y misiones ambiciosas.
Desafíos y Futuro de la Minería Espacial
Simulación por IA de un prototipo de robot mineros espacial.
La explotación de recursos en el espacio presenta múltiples desafíos, desde la identificación de cuerpos celestes con materiales valiosos hasta el desarrollo de tecnologías capaces de operar en entornos extremos y de baja gravedad. La autonomía de los robots mineros es crucial, ya que deben realizar tareas complejas con mínima supervisión humana, lo que impulsa el avance de algoritmos de inteligencia artificial y sistemas de aprendizaje automático especializados en la detección y resolución de problemas en tiempo real.
Además, la aplicación de la inteligencia artificial en la minería espacial ofrece beneficios significativos, desde el análisis de datos complejos hasta la toma de decisiones en tiempo real. Los algoritmos de IA pueden procesar grandes volúmenes de datos recopilados por sondas y robots, identificar patrones significativos y proporcionar información valiosa para la identificación de sitios de interés para la exploración y extracción de recursos.
En el corto plazo, se espera que la robótica en la minería espacial experimente avances significativos en la autonomía y la capacidad de operar en entornos extremos. Las misiones espaciales no tripuladas requerirán robots capaces de realizar tareas complejas con mínima supervisión humana, lo que impulsará el desarrollo de algoritmos de inteligencia artificial y sistemas de aprendizaje automático especializados en la detección y resolución de problemas en tiempo real.
Además, se anticipa que las tecnologías de fabricación aditiva jugarán un papel crucial en la minería espacial, permitiendo la construcción de estructuras y repuestos en el espacio a partir de materiales locales. Esto reducirá significativamente la dependencia de suministros desde la Tierra y facilitará la creación de infraestructuras sostenibles en otros cuerpos celestes.
Por último, se espera que los robots espaciales incorporen sistemas de navegación y comunicación avanzados, lo que les permitirá operar de manera más eficiente y segura en entornos donde la latencia de las comunicaciones representa un desafío significativo.